|
 |
|---|---|
 |
 |
Here you will find an ever-increasing list of applications, examples, demonstrations of our hardware, and how to integrate it with other hardware and your projects.
(please bear with us, this page is under construction as we write up more examples)
The origin of the MotoMaster is actually that it was invented out of necessity. Rather, a course was being taught at UCSD in the Mechanical and Aerospace Engineering Department where students were challenged with building robots as part of a senior design competition. The students were destroying too much hardware each quarter and few robots were succeeding. We needed a multiple PWM motor controller capable of interfacing with the Basic Stamp microcontroller, which was the core of the robot electronics. Unfortunately, none were available at the time which could control enough motors, control both DC and steppers, were flexible, robust, and yet simple enough that the hardware could be described to students. Thus the designer, a Teaching Assistant in the course, developed the first version of the MotoMasters. Immediately there was a positive impact on how many robots were completed, as well as how successful they were at achieving their tasks. The primary goal of educating the students and giving them an experience of mastery was achieved, but there was room for improvement. Version 2 and 2.5 were developed, and then something very similar to what the MotoMasters have become was implemented. The MotoMasters were used for several years in the program. Here you will see images, videos, and descriptions of a few robots and contests over the years which used them. |
|---|
(description under construction)
(description under construction)
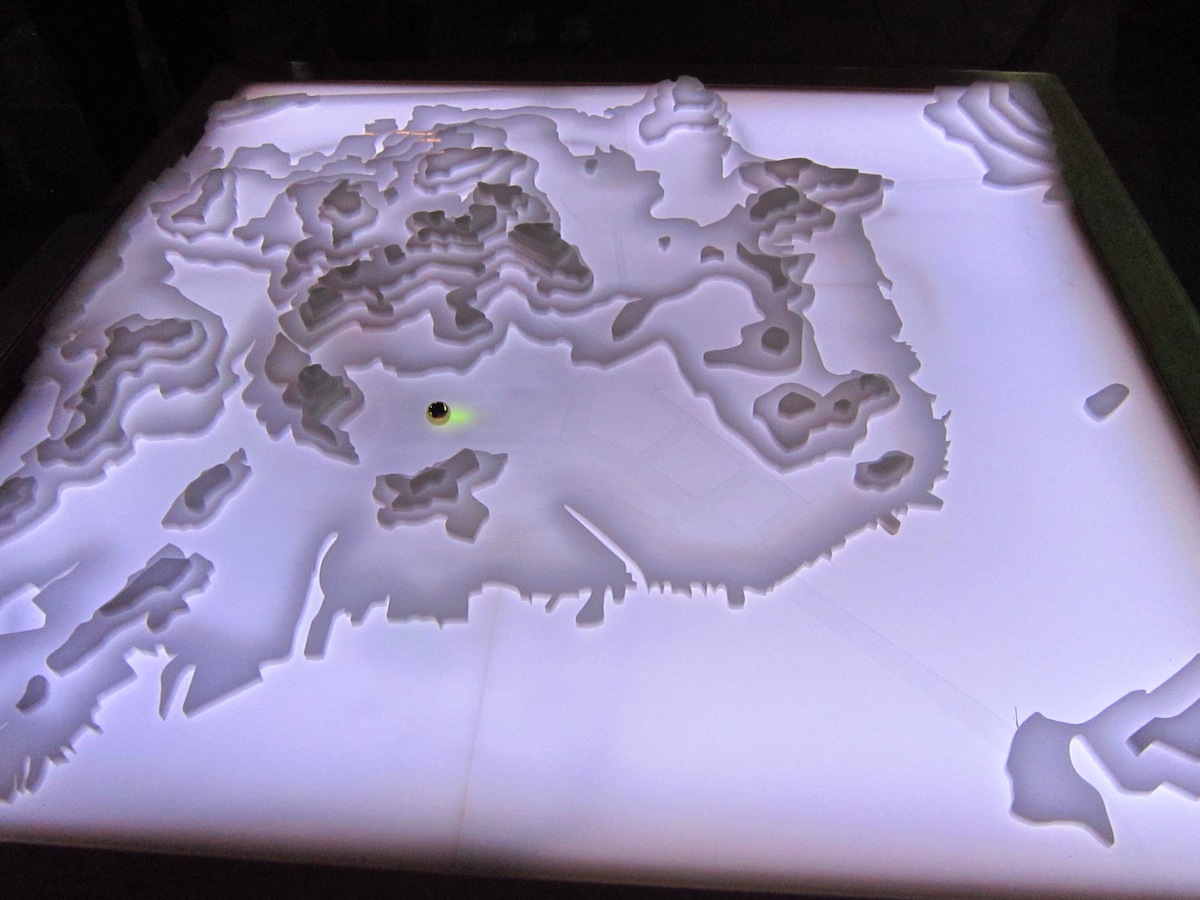
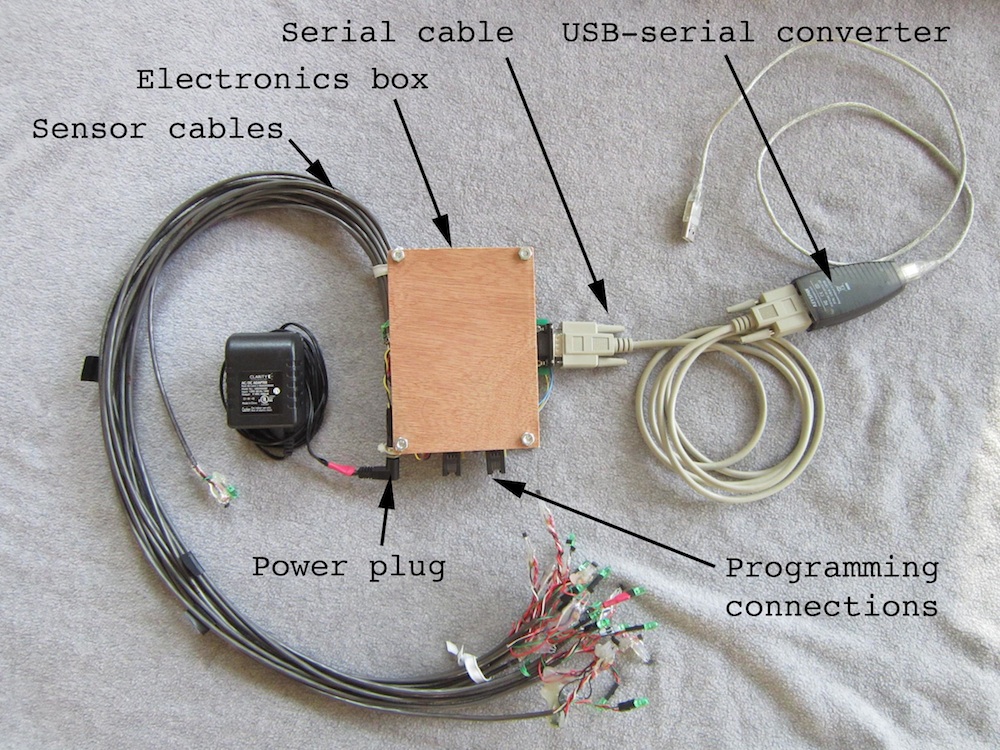
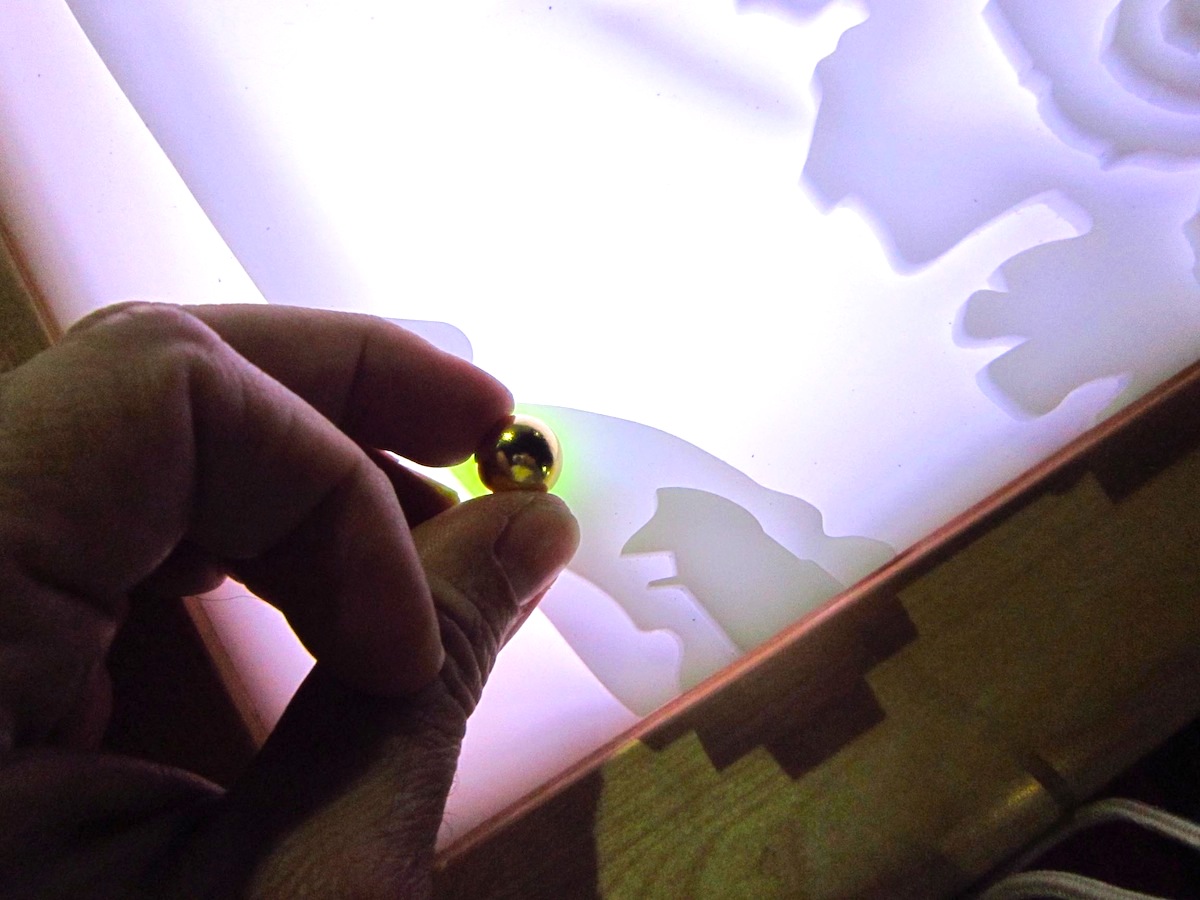
| This installation was the result of a collaboration between a media producer, a videographer, a composer/sound designer/media artist, and a mechanical engineer. This installation consisted of a 3d model of San Francisco, two HD projectors projecting high resolution professionally recorded video of many of San Francisco's sights, and an intelligent sensor board reacting to touches on the model, providing visual stimulus by integrating the MotoMaster with custom firmware to read from the serial communication between the main computer driving the videos and the microcontroller reading from the sensors hidden within the San Francisco model. The MotoMaster's customizability and reprogrammable firmware provided the capability to drive bright high current LEDs, interact with another microprocessor and react quickly, providing a seemless interface. It will be used with even brighter light strips in the future presentations of this installation, and the high current capability of the board will make this possible. | ||||
|---|---|---|---|---|
|
||||
|
||||