RDP Robotics_Research |
Articles (coming soon) |
RDP Robotics has several ongoing research projects. Please contact us (research@robotics.radiantdolphinpress.com) if you have questions or are interested to discuss further Dr. Alex Simpkins has continued many of his graduate research projects and created many more over the years since earning his PhD. Dr. Kyongmi Simpkins has branched from focusing on wet lab type neuroscience to computational and data science-related projects. She is involved in many of the research and industrial projects as well as the educational products we are developing. Among her other skills, Dr. K. Simpkins is the core intellectual property specialist leading efforts to protect RDP Robotics inventions. She is also leading the genetics-related work at RDP Robotics, helping add a vital element to our disease modeling approach. Dr. Charles Simpkins has developed along with Dr. Annellen Simpkins his own model of psychotherapy, and continues to research neuroscience and engineering applications for psychology and neuroscience. He is a co-founder for the RDP Robotics AI project hub, as well as the RDP Robotics research on cancer and diabetes, and is a co-inventor of a novel sensor solution for situational awareness we are developing. As RDP Robotics has evolved as its own entity, research is continuing to evolve out of the needs that have become evident in society. The purpose of research is classically to gain knowledge. Ultimately it is about asking questions that, by exploring, reveals new knowledge that can benefit the world. Some of our technologies will have applications to robotics, law enforcement, emergency services, general automation and many other areas.
Please note: This is an area of rapid development for RDP Robotics, this page is under construction
Robotics ProjectsEmbodied systemsApproximately 25 years ago when applying to graduate school, Dr. Simpkins wrote a letter as part of his application identifying the significance of embodied intelligent systems. He hypothesized that to create optimal artificially intelligent systems, engineers and scientists should create physical robots and embed learning systems that can develop ny feedback through interaction with the environment and their bodies. These systems would have the ability to perceive and act in the real world. The real physical world has constraints and physics that are impossible to fully replicate with simulations (always a simplification), and thus through interacting with the world, AI systems would evolve intelligently in ways that would be distinct and perhaps incorporate the infinite complexity of reality. There is precedent that simple systems designed to interact with the world but may have simple programming can exhibit complex emergent behaviors. Therefore a system with the capability to evolve more complex cognitive processes would have potential. RDP Robotics has projects exploring this that are geared toward home robotics applications and more. While Dr. Simpkins was teaching at UCSD in 2023, he was planning to bring one of the RDP Robotics embodied AI robots to class to attend but it brought up IP issues with the RDP Robotics legal department, so the idea was dropped at the last minute unfortunately. It would have been interesting to see what the AI's reaction to attending a lecture by it's creator would have been, and what the reaction of the class would have been but this will have to wait until it is time.
Home RoboticsWe are developing several home robotics systems to aid in common home tasks. These are stealth projects but are designed to complete tasks that are not yet addressed with commercially available systems. The challenge many of these systems face is smoothly combining or switching between tasks. While there are many compelling demonstrations of humanoid robotics and the field is moving rapidly, the concept of universal task-blending robotics is still in its infancy. We have done a good deal of background work in locomotion, manipulation, coordination of complex systems and navigation. These challenges fit well into the field of home robotics, and we have extended some of the hierarchical control methods for object manipulation into a broader regime.
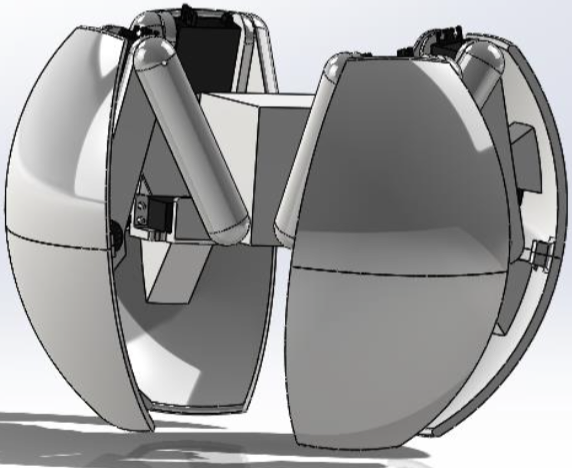
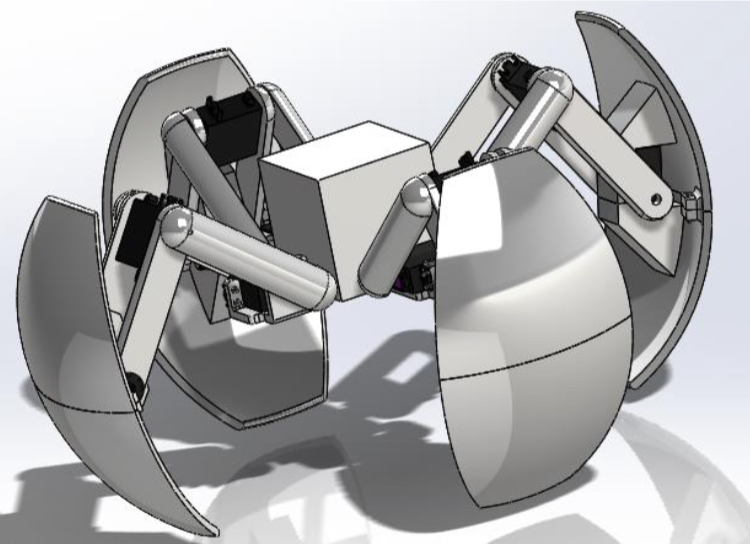
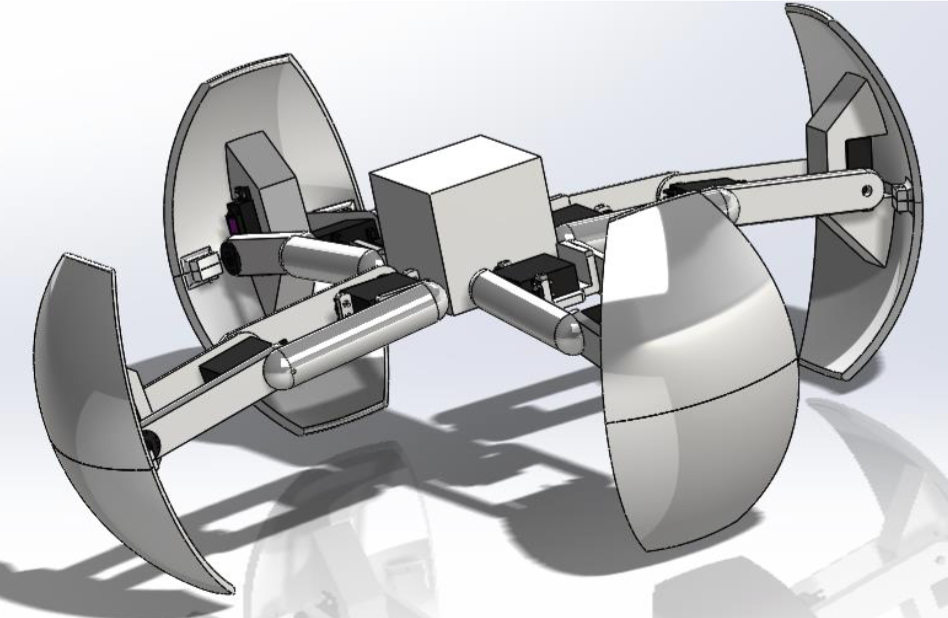
Sphero - Spherical Dynamic RobotThis is an experimental system designed to explore the blending between locomotion through walking and locomotion through rolling. This is actually a series of robots that can seemlessly combine those modes of movement. We have sponsored a project related to this at San Diego State University years ago but have also worked on this interesting dynamic internally. Below is a concept development stage prototype design. This type of robot configuration has the potential for high locomotion efficiency as well as adaptability. There are some environments where rolling is an ideal locomotion and some where walking is more ideal. Most environments are somewhat mixed as well. RDP Robotics has explored a variety of control approaches to this type of system to coordinate the many degrees of freedom for dynamic shape control in such a way as to create predictable movement. Spherical shapes have advantages also because they have nothing to get caught on objects in the world, no sharp edges, open spaces or corners and therefore could be deployed by dropping through trees and other spaces that may stop other machines. They also have an efficiency advantage over walking robotics since they can roll over long distances with minimal energy consumption. Additionally, locomotion via walking and rolling algorithms can be very simply implemented. The really interesting aspect of this type of robot is the potential for hybrid walking/rolling locomotion. The longterm goal of this work is to explore reconfigurable modular robotics and generalizable self-discovery algorithms that can be implemented as a blank slate on any one of a number of robotic structures, quickly optimize themselves and adapt as needed in realtime. Our hierarchical control algorithms have been extended to this type of paradigm and already can be applied to manipulation/locomotion tasks efficiently. In this way this project dovetails well with the biomimetic projects ongoing. While the images shown below are an early concept, Sphero has numerous configurations that keep within the spirit of a hybrid locomotion system.
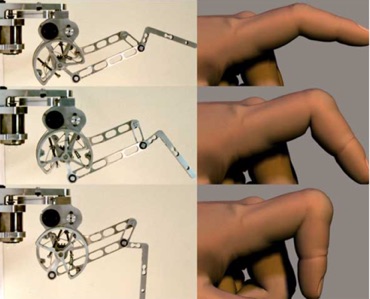
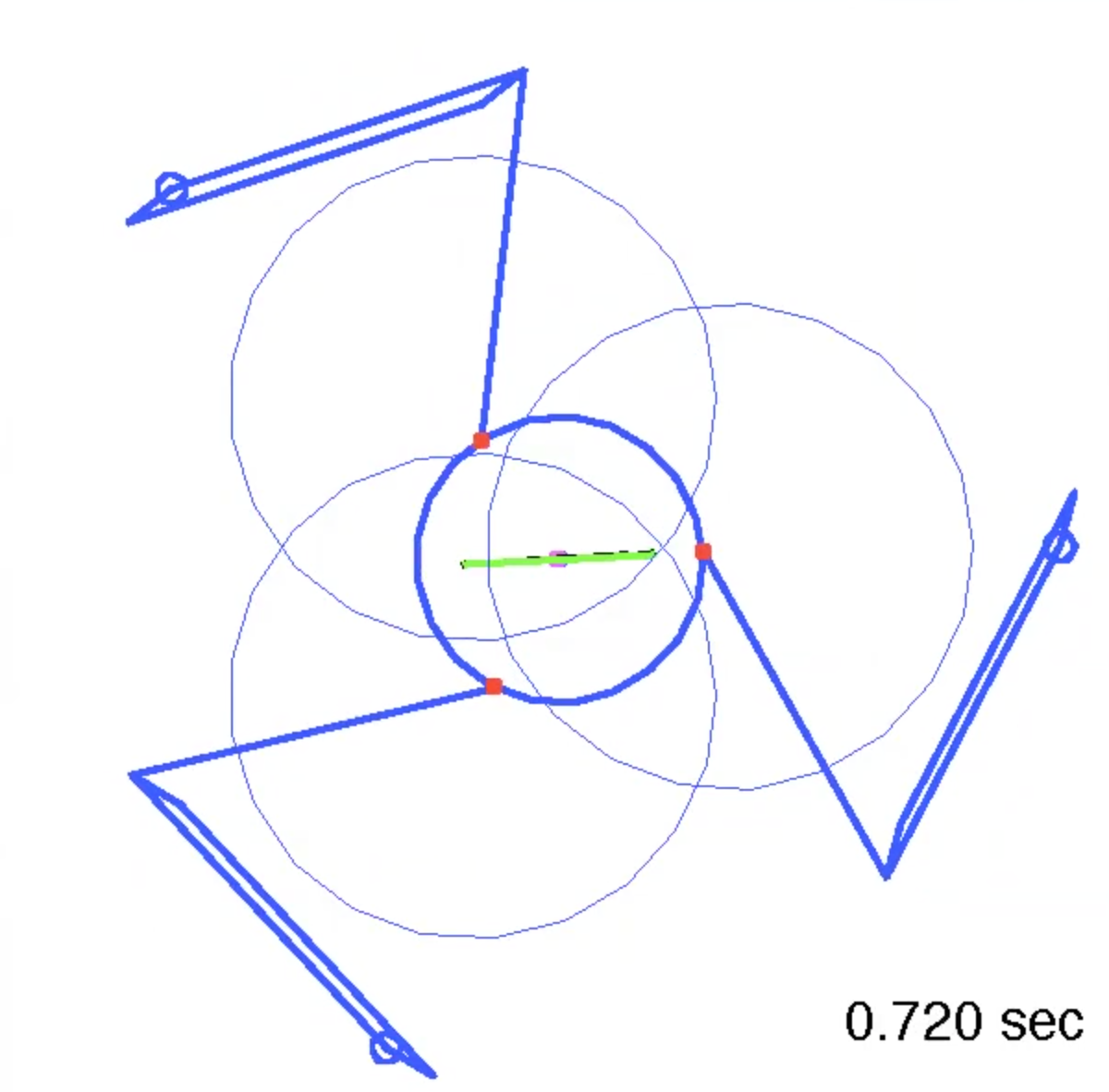
Biomimetic Modular RobotsBiomimetics and Robotics projects - Biological systems have evolved to intelligently interact with the world and achieve a variety of tasks. For example a human can perform surgery, drive a car, operate a computer, walk, throw a ball, play with their children, write poetry with a pen on paper, wash dishes, fold laundry, perform a martial arts form and more. Given enough learning, humans can easily perform vast varieties of tasks and can perform these tasks in changing, uncertain and dynamic environments. Traditional robotics are not designed in this fashion. Historically robots have been designed to perform specific tasks in very controlled situations, and do not smoothly blend between tasks or perform wide varieties of tasks in uncertain changing dynamic environments. Our research into Modular Biomimetic Robotics aims to address gaps in the current conceptual approach to robotics and their control. Below are images of work performed at the University of California, San Diego and University of Washington. We have also sponsored industry research projects at San Diego State University along these lines of research. The RDP Robotics founder led the development of these systems and designed/developed the electronics and PCB, cabling (not trivial for highly compliant systems), embedded systems and associated software, high level software, CAD design (in collaboration with Mike Kelley, M.S.), touch sensing system, hierarchical control algorithms and other aspects. These systems are highly compliant, dynamic, robust and provide 3D touch sensitivity at the end effector. The touch sensor can distinguish between different textures of surfaces, and measures a wide range of forces at a high dynamic sampling rate. Current systems, which are independently developed from the university and well beyond these research prototypes, are not published publicly, but have superior characteristics and approaches to these systems. However the initial experience with biomimetics, compliant at the actuator drives and modularity began there. Dr. Simpkins also has developed a set of robotics libraries that operate hierarchical realtime control implementations but are very easy to work with as well as a high level computer software interface that is adaptable to windows, mac, and linux. Do you have a need for biomimetic robotics, perhaps that are compliant or that are modular and can be dropped into your system? Contact us (research@robotics.radiantdolphinpress.com) and we can discuss applications
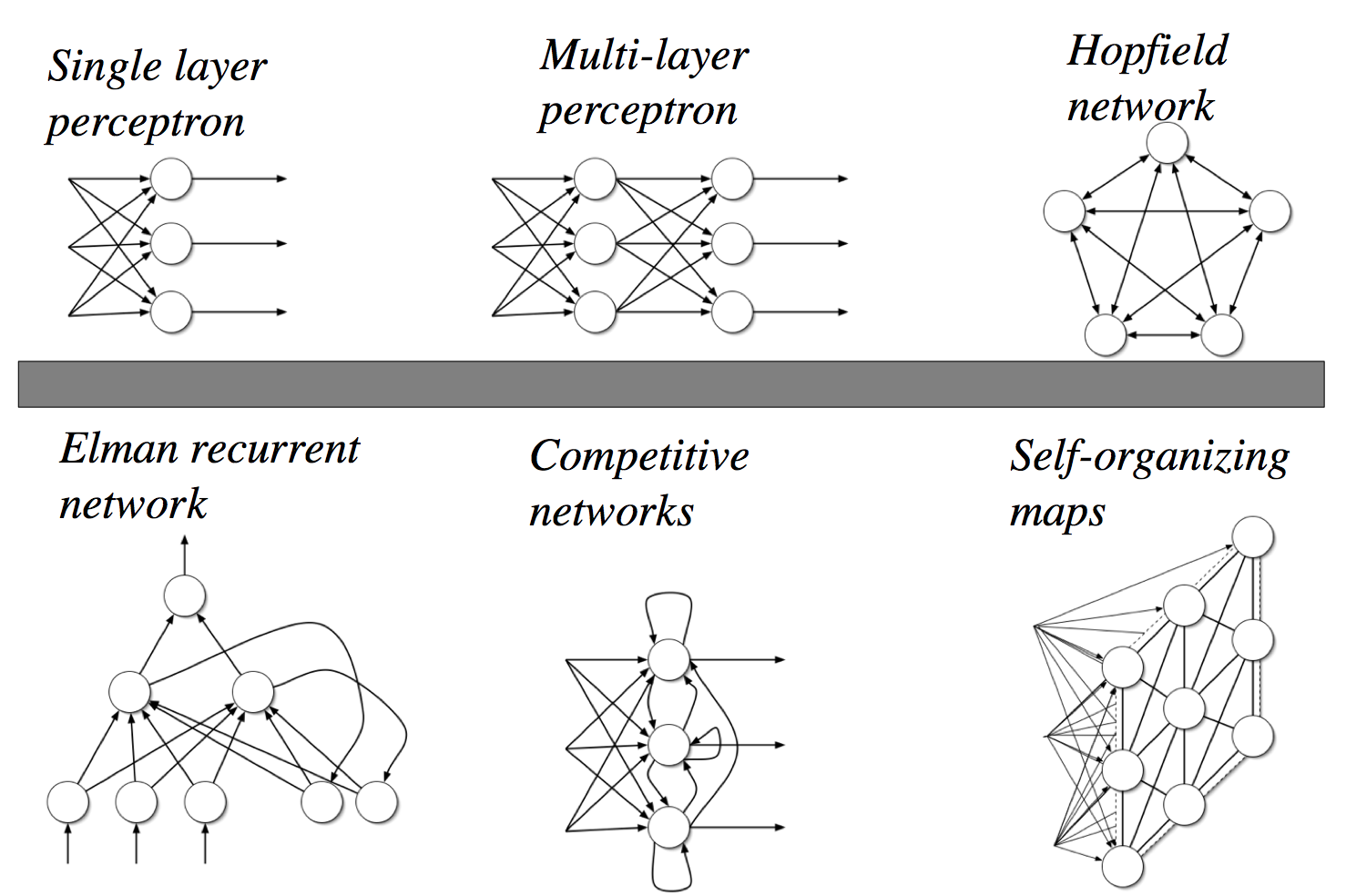
AIWe have been working with Artificial Intelligence for over three decades. AI spans a broad set of fields, and we have been engaged in a broad set of applications. Some of the AI systems we are developing relate to mental and physical health, disease diagnosis, treatment and assessment, robotics, consciousness and more. As a graduate student Dr. Simpkins created a conversational AI for his students to assist in answering student questions when he was a teaching assistant at UCSD (this is long before such things were commonplace). While it was a deterministic algorithm and had limitations, it's effectiveness inspired Dr. Simpkins to recognize that seemingly simple approaches can be very effective at solving complex problems. This falls in line with the Engineering Model, which looks for pragmatic, effective solutions that are as straightforward as possible. While most people are aware of "AI" from the perspective of movies and LLM type chatbot prompt/response paradigms, Artificial Intelligence can generally be defined as any artificial system that solves a problem normally solved by intelligent (typically human) biological systems. Therefore many computational solutions to problems traditionally solved by people are also defined as AI solutions. Here is an article about AI. Interested in AI at RDP Robotics? Contact us! (research@robotics.radiantdolphinpress.com)
Neuroscience, Behavioral Sciences and Mental HealthWe have a number of projects in process and in planning stages related to these topics. We are exploring modeling levels of consciousness with applications for aritificial systems as well as genetics projects, various applications for therapy, education, learning systems, genetic predictive modeling, and more.
Cancer, Diabetes and General Disease Modeling and ControlRDP Robotics is applying computational methods, machine learning, system identification and control theory to not only developing disease models but also developing predictive control systems to control disease outcomes. We are including highly broad data dimensions ranging from behavioral all the way to genetic. Our work reaches beyond machine learning to incorporate closed loop modeling and methods including not only neural networks but also other approaches. We have put significant focus on research and development related to the recent COVID-19 pandemic. RDP Robotics is developing novel technologies to help combat this and other infections from both a robotics perspective and artificial intelligence perspective. Some of our AI methods include System Identification and Machine Learning techniques combined with novel Control Theory methods we have developed over the past 25 years to reduce overall infection rates and control diseases themselves. While the research is in process, we are also seeking additional funding from the government and private funding organizations. This was a global disaster, and we are doing what we can to make a difference now and in the future. If you are interested in contributing at any level please contact us (research@robotics.radiantdolphinpress.com).
PerceptionRDP Robotics has been developing a series of novel sensors related to artificial vision and situational awareness. These have applications for individuals, law enforcement, autonomous systems, robotics and anywhere a sensor is needed that provides vision type information with lower computational and power demand than traditional stereoscopic systems. Currently we are researching with these sensors and will soon offer them as modules to be integrated into other systems or for standalone use. As always, reach out if you have interest in how these sensors can enhance what you do or fulfill a need you have. We are continuing to work on developing sensors with lower energy, space and computational loads for integration into any system requiring situational awareness. Almost daily we are discovering applications for these systems.
DronesDrone systems enable viewing and interacting with remote environments, as well as enable autonomous action. The past two decades have seen unprecedented growth in the capability and variety of drone systems, software and hardware. Drones can be employed by police, firefighters and other emergency responders as well as for inspection, art, entertainment, sporting, military applications of course, and more. Their use as a tool expands almost daily. RDP Robotics has performed consulting work for multiple drone companies on most aspects of drone design and development. We have designs for our own drones and drone base stations as well as other subsystems, and interested parties can contact us (research@robotics.radiantdolphinpress.com) for more information.
HapticsHaptic systems provide some sort of feedback to a user, typically through vibrations. When your smartphone vibrates to notify you of a text message, and you can tell a text vs. a call from the vibration pattern, that is a haptic feedback signal. Apple's forcetouch trackpad provides the illusion of clicks even though the trackpad is not clicking upon a press. This illusion is created with clever haptics only! Dr. Simpkins (Jr.) is listed on multiple patents related to haptics, and has completed projects with major companies such as Sony (for Playstation). These systems can create high fidelity vibration and haptic feedback using a combination of communication and control algorithms (we designed), sensors, motors and either eccentric rotating masses (ERMs) or linear resonant arrays (LRAs). We use an independent haptic technology newly developed since that work as part of our sensor systems to provide user feedback. Our owner and participants have graduate degrees in not only engineering but also psychology, cognitive science and neuroscience, and we leverage that knowledge to enhance our products and services.
Rapid prototypingWe have conceptualized and developed alpha prototypes of novel rapid prototying machines. These achieve a higher speed than common fused deposition modeling systems and yet lower vibration due to the design approach. We have also created a number of novel approaches that increase the speed of fused deposition modeling prints. RDP Robotics employs rapid prototyping technologies to explore designs before mass manufacturing. There are also many open applications for AI in rapid prototyping as well as design. |